-
StatusCompleted
-
Status date2009-03-19
-
Activity Code4A.027
A system PDR was successfully completed with ESA in February 2006 for the CX-OLEV mission, a GEO on-orbit servicing system for extending the mission lifetime of GEO telecommunication satellites. As this system is now based on a SMART-like platform, this study has been carried out in order to achieve the same level of maturity with the new spacecraft. This adaptation study has been restricted only to the SENER responsibilities in the project lead by SSC: Guidance Navigation and Control (GNC) subsystem, Mission Analysis, OLEV Simulators and Test Facilities (OSTF) and Reaction Control System (RCS).
In the frame of the SMART-OLEV project, developed by SSC, SENER and Kayser Threde in a purely commercial basis, SENER is responsible for some of the main subsystems and tasks like the GNC subsystem, the Mission Analysis, the OLEV Simulators and Test Facilities, the RCS subsystem and the RV camera image processing. All these subsystems were developed at System PDR level under an ESA ARTES-4 project when the space segment was based on the ConeXpress platform. After the transition to a SMART-1 like platform, an adaptation study has been performed by SENER in order to achieve the same level of maturity for all these elements.
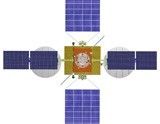
SMART-OLEV is designed to operate for up to 12 years in or near geostationary orbit. The service lifetime of a particular mission will depend on the mass of the client satellite and the type of operations required. The maximum lifetime will be 12 years for a continuous North-South, East-West station-keeping mission for a 2000kg Client spacecraft. In addition to this standard operation, SMART-OLEV can provide various other services as requested by a client including: undocking and re-docking from one client satellite to another, relocating a satellite in the geostationary arc, removing inclination from a client satellite, rotating the orbital nodes for a client satellite in an inclined orbiting satellite and in orbit storage.
SMART-OLEV in its Mated configuration

The Station-Keeping operations and the transfer phase are performed using Electric Propulsion, with a significant saving of propellant fuel and, obviously, an extension of the mission lifetime. The system is designed in order to perform these tasks with a set of possible Client S/C’s in the range of 800-2500kg (dry mass). An automatic RV approach to the Client S/C is performed using cameras and image processing algorithms that are run on ground. All simulator and test benches to be used in the frame of the SMART-OLEV project will be developed internally in SENER.
SENER is developing these elements for SMART-OLEV, which is the main expected customer for them. Therefore, the expected benefits are very much linked to the SMART-OLEV success. SENER participation in SMART-OLEV is secured by the teaming agreements that have been signed between the different partners in the project. However, in addition of this direct market opportunity derived from its participation in SMART-OLEV, some of the proposed developments can also be applied in other missions or systems:
- The RV concept based on cameras and image processing for relative navigation can also be applied to any other RV&D mission in the frame of ESA programmes: future Exploration programme missions, PROBA-3, IBDM Demo Mission, etc.
- The RCS based on Xe as propellant to be used as cold gas is a good complement for Electric Propulsion subsystems based also on Xe, providing an optimal solution at system level for maximizing overall mission lifetime with just one propellant and a common set of tanks. Existing RCS systems based on Xe handle much lower mass flow rate and have less performance than the system proposed for SMART-OLEV.
- A full set of Processor-In-the-Loop and Hardware-In-the-Loop facilities will be developed with potential use in any of the previously mentioned future missions for AIT purposes at different levels: system, GNC and RV&D payloads.
- Regarding routine operations, several strategies for performing on orbit servicing will be further developed for a system based on Electric Propulsion and different configurations, a least one per Client S/C.
All these developments will allow SENER to participate at different levels in future RV&D missions.
In addition to the Mission Analysis, which includes all mission phases like transfer, RV&D, Mated, transfer to the graveyard orbit undocking, the main elements to be designed by SENER are the GNC subsystem, the RCS subsystem and the OLEV Simulators and Test Facilities. The GNC subsystem is based on two star trackers, four RV cameras, two coarse rate sensors, one internally redundant sun sensor and four reaction wheels as attitude actuator. This subsystem, controlled by the GNC Core that is part of the OBSW has also external interfaces (for measuring and/or commanding) with the Electric Propulsion subsystem (EPS), the RCS, the Solar Array Drive Mechanism and the Docking Payload.

RCS and EPS are assumed to share Xenon propellant tanks. Several configurations have been studied in order to determine which one would better solve the problem of Xenon expansion without phase change from main tanks to the thrusters. After several trade-off studies and simulations, a two stage pressure regulation with heat addition has been selected. The SMART-OLEV OSTF will be used by several users on subsystem and system level to support the design, development, testing, maintenance and operations of the SMART-OLEV. For efficiency and consistency the needs of the different users have been combined in 3 SMART-OLEV simulation platforms: DSF, PIL and HIL.

The DSF simulation platform supports the design phase of the SMART-OLEV platform and payload. The PIL simulation platform supports the SMART-OLEV platform GNC and OBSW software verification, and Flight Software patching procedure testing. It also supports the system verification (test development and ground stimuli generation), and operation activities. The HIL simulation platform is to support the SMART-OLEV platform (including GNC) and payload verification, SMART-OLEV spacecraft and mission level verification.

The business plan is being consolidated after the signature of a contract with one of the main world telecom operators and private funding negotiations. Preparation activities for Phase C/D/E are now currently being carried out by the industrial consortium, including negotiation with baselined subcontractors for some of the subsystems and units. Phase C/D/E activities will be started on January 2009 with a target for launch on 2012.
Under the frame of the present project the SENER activities in SMART-OLEV system have achieved a maturity level similar to the one achieved in CX-OLEV. However, some of them were not under the SENER responsibility and CX-OLEV and they have been assumed in this new system: RCS and OSTF.
New requirement specifications have been produced and consolidated for GNC, RCS and OSTF, which has been traced upwards with the System Requirements document produced by SSC and the Mission Requirements document produced by OSS AB. Using these specifications as basis, these subsystems have been designed and reported in the relevant documents.
GNC subsystem design has been complemented with the FDIR design, related to GNC elements. Design, Development and Validation Plans have been elaborated for all these subsystems, paving the way for future project phases. The SMART-OLEV team is currently working in the preparation of the proposal to OSS AB for the production of the first three satellites, which will be launched with a six-months delay between them. The foreseen Effective Date of Contract at this time is January 2009, with a launch date in 2012.