
-
StatusCompleted
-
Status date2017-04-11
-
Activity Code4A.041
The objective of this activity is the development of a CAN bus solution to be used in platform and payload avionics of telecom satellites. The proposed CAN solution has to cover all the aspects related to the introduction of the CAN bus in telecom satellites, from the physical and protocol layer definition up to the test and validation procedure definition.
Key project challenges:
- Implementation of a single solution common to both RS485 and ISO11898 networks
- Network start-up and sub networks synchronization
- Network redundancy and reconfiguration procedures
- Hardware implementation of additional protocol functions (ECCIPC)
- Automatic test procedures implementation
- EMC test result analysis due to weak flight representativeness of the test bench hardware
Technical benefits: The CAN bus is a full European technology used since years in the automotive industry, it offers the same reliability of other bus standards like the MIL-1553 offering high saving in the overall power consumption (1/10 of the mil-1553) without any ITAR restriction. It has been selected as alternative of the OBDH bus with significant savings in spacecraft mass due to reduction in number of wires. Furthermore, the capability to manage up to 128 nodes on the same CAN bus, is seen as a major advantage over the existing legacy buses.
Economical Benefits: large availability of low cost commercial and high grade components thanks to its utilization in several different industrial environments. For the same reasons test equipment and development tools are also available at lower cost. Thanks to the higher frequency of the bus the duration of the spacecraft, test campaign duration is reduced with overall benefits in the spacecraft test schedule and cost.
Upgraded Spacebus NEO avionics dedicated to the payload bus implemented with the CAN bus. The following key features have been implemented:
- RS485 physical layer
- ISO118908 physical Layer
- 120 nodes for each physical layer
- Bus rate 512kbps
- Three types of slave nodes
- Asynchronous-NODE (A-NODE): this node implements only asynchronous on-request telemetries. This node is fully representative of the MEGA ASIC implemented by TAS Toulouse.
- Synchronous-NODE (S-NODE): this node implements only Cyclic Synchronous Telemetries and configuration non-acknowledged commands.
- Acyclic-Synchronous-NODE (AS-NODE): this node implements only Acyclic Synchronous telemetries and configuration non-acknowledged commands. It accesses the bus only when commanded by the bus master and waits for the correct synchronization message before transmitting.
- Datalink Layer: Hurricane CAN controller
- Protocol Layer:
- Slave implemented with ECCIPC for the real nodes and with the CANOpen CANOe library for the simulated nodes
- Master node implemented with the CANOpen CANOe library
- Only the following CANOPEN services have been used
- NMT protocol
- Heartbeat protocol
- Only PDO transmission is used, no SDO transmission is performed in our simulated network.
- Custom selective bus architecture and redundancy management
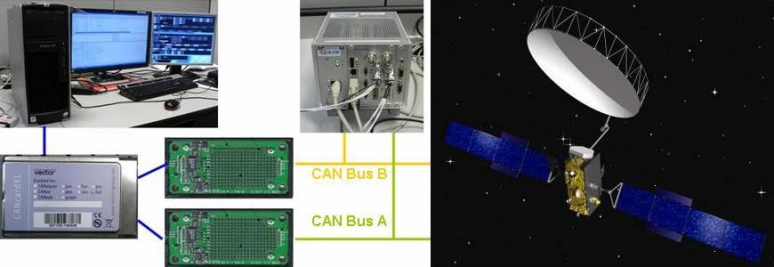
Two different physical layers have been analysed and implemented according the CABCOM study requirements:
- RS-485 network: four sub network composed of 31 nodes each operated in time multiplexing by a single master
- ISO-11898 network: a single network with 120 nodes operated in time multiplexing by a single master
The upgraded Spacebus Neo avionics architecture replaces the OBDH lines dedicated to the payload busses with the CAN bus. The high-level payload bus performances have been therefore inherited from the Spacebus 4000 requirements.
As a First Task, the system requirements for a robust CAN solution for SATCOM have been defined.
Second Task focused on the inclusion of a standard protocol layer implementation and its impact on the overall SATCOM architecture.
The Third task, focused on the design, implementation and justification of the selected CAN bus solution and its test set-up.
In the Fourth Task both simulated and hardware in the loop protocol tests have been performed and relevant results analysed. Also the EMC test campaign has been completed for the ISO118908 physical layer.
Fifth and last task has been dedicated to the study documentation finalization and closeout.
Completed.


