
-
StatusCompleted
-
Status date2017-03-06
-
Activity Code4G.005
In the current generation of platforms, the complete avionics for the satellite are provided via two separate units, the PFDIU (PlatForm Distribution Interface Unit) and PLDIU (PayLoad Distribution Interface Unit). The position of these units within the overall satellite architecture is shown in the following figure:

The principal objectives of the ARTES 3-4 Activities can be summarised as follows:
- Detailed design and analysis of several modules being part of the PFDIU and PLDIU
- Manufacturing and test of these modules as part of the FUMO
- Manufacturing of a single EQM containing all the SDIU modules (two per type)
- Test of this EQM, leading to the qualification of both units.
All of these activities have led to a cost reduction of 30% for the complete avionics subsystem.
The main challenge for the programme is achieving the significant cost reduction targets. In order to reach the cost reduction target, a proprietary digital programmable controller (DPC) is introduced. The DPC is a generic device, which associated with a dedicated firmware, allows execution of various different management, command and control functions required in the PxDIU’s. The integration of this DPC and associated firmware represents one of the main technical challenges on the programme.
The main benefits brought by the project are, from a commercial point of view, the increased competitiveness, and from a technical point of view, an increased flexibility at system and operational level, with a transfer of certain management elements from the on-board computer to the avionics, therefore reducing the tasks to be done centrally.
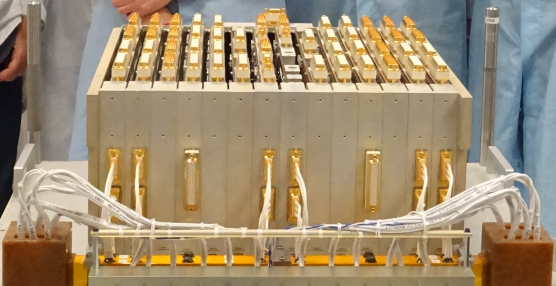
There are 2 different units, one dedicated to the payload interfacing and control, and the other to the platform, the PLDIU and PFDIU respectively. The architecture foresees two identical units from a physical point of view, each able to host 14 modules. These modules are stacked and inserted into a backplane that distributes the internal communications bus. The unit is consolidated, from a mechanical point of view, by a baseplate, end plates and top cover. An external Bus Bar distributes the main power bus (100v). The development of the unit implements a number of features to ensure full physical segregation between nominal and redundant chains.
The 2 central modules, called STUB, are identical and provide:
- 1553 interface to the external system
- Power supplies for all of the internal power needs as well as certain functions such as telecommand generation, motor driver supplies and sensor supplies.
- Management, command and control of the PxDIU through an internal CAN bus.
To each side of the nominal and redundant STUB modules are up to a total of 7 + 7 functional modules containing all of the functions necessary for: the distribution, protection and monitoring of the 100V main bus power to user equipment; distribution, protection, switching and monitoring of heater power; driving and control of solar array deployment and rotation; chemical propulsion command and control; reaction wheel interfacing; Li-Ion monitoring, and control of cell bypass and cell balancing elements; generation and management of an external CAN bus for future payload needs.
The overall dimensions are 451 x 521 x 224 mm3 (L x W x H) while in the baseline configuration the mass is 28kg for PFDIU and 32kg for the largest PLDIU version.
Refer to Product features.
The global Project plan is as follows:
- ARTES 3-4 study (baseline architecture definition – status: completed)
- ARTES 5.2 project (risk reduction phase concerning the implementation of digital power control and the introduction of a CAN communications bus, manufacturing and test of a FUMO – status: completed)
- ARTES 3-4 project (development model, subject to a full qualification campaign to demonstrate that the proposed design is compatible with a 18 year mission in geostationary orbit – subject of the present web page). Status: completed.
The project is completed.