

-
StatusCompleted
-
Status date2016-03-02
In order to address the new constellations and signals, the increasing amount of satellites and the higher complexity of the algorithms, our technology platforms needed to evolve on:
- Baseband SoC
- New CPU subsystem (incl. new Real-time operating system)
- Front-end building blocks
Therefore a new – fourth generation – activity was proposed under Artes, which resulted in the contract of this activity.
On the technology side, the following building blocks were developed:
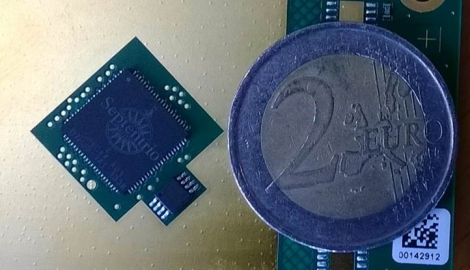
- GReCo4 baseband ASIC (released in 2014)
- Enhanced Loose Coupling Hybridisation software (ELCH, released in 2014)
The contract also comprised the development of 2 OEM products: the MF Rover and the MFMA Rover which reached the market in 2014.
Septentrio’s GReCo3 digital ASIC subsystem needed to be optimized primarily for power consumption.
Septentrio’s current GNSS/INS product was not fit for mobile mapping:
- The use of a MEMS IMU made it impossible to meet the typical coasting requirement (<1m drift after 60s / 1km outage) of mobile mapping applications
- The PVT (RTK) availability and robustness was sub-competitive because the IMU data was not exploited in the PVT engine (loose coupling)
Septentrio’s current dual-antenna receiver provided dual frequency GPS+GLONASS RTK combined with attitude determination with a power consumption just below 5W. This needed to be modernized.
The Enhance Loose Coupling Hybridisation software provides improved accuracy and increased reliability for mobile mapping (MM) applications. It combines GNSS and INS in post-processing and relies on the smart coupling algorithm between INS and GNSS data that was developed in this contract.
The MFMA rover is the most advanced multi-constellation dual receiver from Septentrio. Its triple frequency engine can track all Global Navigation Satellite System (GNSS) constellations - GPS, GLONASS, Galileo, BeiDou, IRNSS and QZSS – on both antennas. It supports current and future signals as they become available – guaranteeing reliable and accurate GNSS positioning into the future.
The MF rover and MFMA rover offer the highest possible accuracy, scalable to a centimeter; it maintains tracking during heavy vibration of machines and assures the position accuracy even under difficult ionosphere conditions. The receivers feature special interference mitigation technology which filters out ambient intentional and unintentional RF interference.
The receivers can be operated without any special configuration software via the built-in webserver accessible via network or USB connection.
Enhanced Loose Coupling Hybridisation software
ATLANS-C is a high-performance position and orientation system, designed specifically for land and airborne mapping applications. With its small size, low weight, low power consumption and solid-state fiber-optic inertial navigation system (INS), it provides all the necessary data for demanding superior mobile mapping applications. The ATLANS-C product hosts the AsteRx3 GNSS board, on which the ELCH firmware runs.

ATLANS Post-Processing Software is a powerful tool for improved accuracy and increased reliability for mobile mapping (MM) applications. It is all-in-one software and combines GNSS and INS in post-processing. It relies on the Septentrio-iXBlue GNSS inertial link (SIGIL) smart coupling algorithm between INS and GNSS data.
MFMA rover
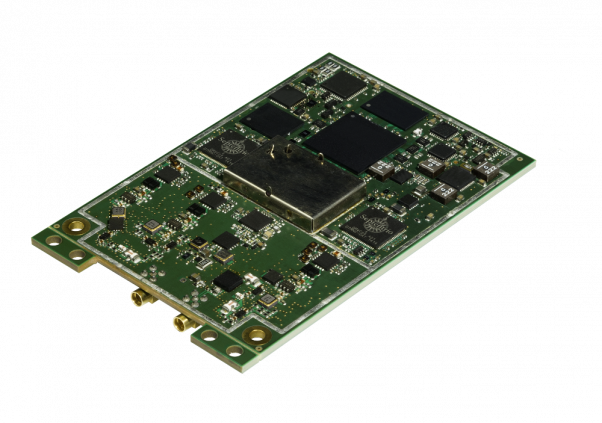
The MFMA rover key features are:
- 544 channels for tracking all known and future signals from GPS, GLONASS, GALILEO, BEIDOU, IRNSS, QZSS & SBAS on both antennas
- Precise and robust heading calculation
- cm-level (RTK) and dm-level (PPP) position accuracy
- Dual L-band channel, support for TERRASTAR and VERIPOS corrections
- Septentrio GNSS+ algorithms for robust industrial performance
- Built around the new custom built GReCo4 GNSS chipset and powered by the newest algorithms for robust and accurate positioning
The activity started in December 2011 and ended in November 2015.
The GReCo4 chip has been successfully manufactured and integrated in Septentrio’s next-generation products from end 2014 onwards.
Septentrio has developed, in cooperation with an INS manufacturer, the Enhanced Loose Coupling Hybridisation (ELCH) firmware, which is part of the - since 2014 – commercially available ATLANS-C product.
The MFMA rover is currently Septentrio’s flagship product. It is being shipped commercially from end 2014 onwards in two different configurations, single antenna and dual antenna.
