
-
StatusCompleted
-
Status date2015-11-17
The main objective of the study was to perform and assess the feasibility analysis of a GNSS (Galileo/GPS) receiver module (PCB), built around ESA’s AGGA-4 ASIC, as part of a GEO telecommunication platform central computer. This design is targeted on a “low-end” receiver configuration, which is mainly expressed by a single-frequency (L1/E1), open-service receiver, to be hosted on the on-board computer of a recurring telecommunication platform in GTO/GEO orbit. The major benefit of this approach are a low-cost of the function, the reduced power consumption with respect to a stand-alone GNSS receiver implementation (due to sharing of critical resources with the rest of the computer) but preserving the performance requested for the GEO and GTO applications.
Long duration manoeuvres in GEO and use of electric propulsion to perform or complement the transfer phase to GEO (typically 3 to 6 months of quasi continuous thrust) increase the need for spacecraft autonomy, making usual ground ranging operations less attractive.
The GNSS use at GEO altitude and in the GTO phase is the natural
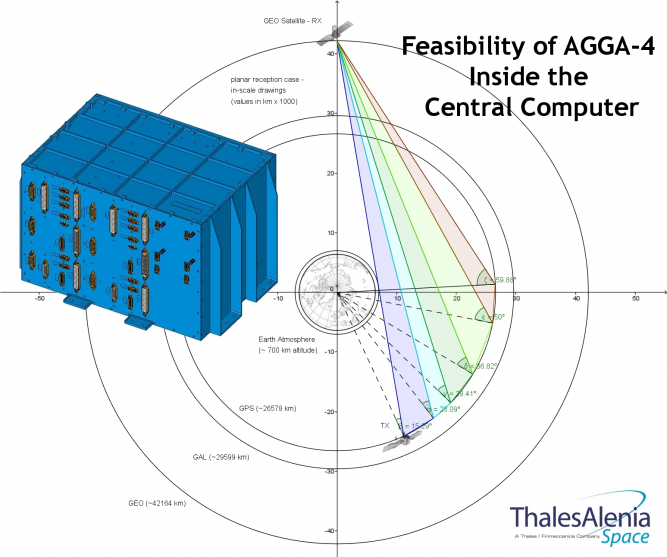
solution for the platform positioning needs, but is mostly limited by the availability of the GNSS signals at the receiver. The reception geometry is completely different from the one experienced on ground or in LEO orbit. For GTO or GEO orbits, the use of GNSS receiver has been questioned for a long time because of the lack of knowledge on the GPS signal availability on those orbits. Improvement in receiving techniques, better knowledge of GPS and GALILEO antenna side lobes and GALILEO constellation future availability have recently removed the obstacle to this solution.
The study confirmed that a low-cost, single-frequency GNSS receiver can provide positioning and timing services to the host platform in almost all the flight phases. In fact, it has been proved that the receiver can provide in real time the time tagged 3D-position and velocity in a specified reference frame for a consistent part of the GTO phase (also with the aiding of an on-board filter) and continuously provides position and time in the GEO phase. This improves spacecraft autonomy and simplifies the ground tracking and ranging segment. Concerning time determination, the receiver provides an accurate time reference, synchronized to GPS or GALILEO time, and in turn to UTC, to better than 1 ms. In terms of autonomy, an “higher level” centralized strategy (On-board Orbit Propagator) has to be addressed in order to compensate for the unavailability of the position solution from the GNSS receiver expected in the GTO phase in an accurate way. The integration of the receiver in in the on-board computer results in an attractive solution from the point of view of the platform avionic. Moreover, the option of the GNSS inside the on-board computer is an advantage from the cost point of view with respect to a stand-alone solution.
The basic elements of the GNSS acquisition and processing chain are the Receiving Antenna(s), the Antenna Front-End (Filter and LNA) and the GNSS acquisition & processing electronics, the latter housed on a single board (GNSS Board) on the Central Computer. The reference frequency is derived from the TAS-I On-board Computer Oscillator (HACO), compatible with the requirements of a low-cost GNSS navigation function in GEO/GTO. The electronics is housed on a double Eurocard PCB and can be integrated easily in the OBC mechanical box. The GNSS board is conceived in order to require only supply voltages and external reference clock from the OBC electronics, resulting in an independent section that can be tested as a standalone item. The GNSS Board can be turned ON/OFF by means of electronic switches. The overall GNSS board power request is estimated to be below 12 W. The board has been built around the ESA AGGA-4 technology availability.
SYSTEM ARCHITECTURE
The proposed GNSS architecture is designed to maximize the sharing of the resources already available in the existing TAS-I on-board Computer (SMU V2) design. The secondary voltages used by the GNSS board are compatible (in terms of voltage and current) with the output lines of the existing Processor Module (PM) DC/DC converter. A cold-redundant, fully segregated GNSS functions have been proposed, in line with the strategy of the OBC. The communication with the PM occurs via a SpaceWire link. Real-Time Navigation Data (Position, Velocity, Time), as well as basic house-keeping telemetry, are provided from the GNSS to PM at a low rate (1 s). In this way, the central On-board Orbit Propagator (OOP) can rely on trusted positioning measurements to carry out the in-advance planning of the platform tasks.
The logic adopted in the study reflects the work logic on three steps proposed in the Statement of Work:
Task 1: Requirement Specification of GNSS receiver module for central computer
Task 2: Architectural Trade off & Performance Assessment,
Task 3: Development Plan & Flight Opportunities.
The three associated reviews SRR (System Requirements Review), PDR (Preliminary Design Review) and FR (Final Review) have been held in December 2013, June 2014, and September 2015.
The project has been completed.
