

-
StatusCompleted
-
Status date2019-08-01
-
Activity Code4C.028
For standard CP telecom satellites, the duration of the GTO-to-GEO transfer is typically in the order of 1 week only. Since continuous ground coverage is a standard requirement, this means that ground-based orbit determination is considered received “free-of-charge”, and there is thus no cost incentive to implement on-board GNSS.
With the introduction of all-EP satellites such as OHB’s Electra, the attractiveness of on-board GNSS comes into a new light. All-EP satellites will have GTO-to-GEO transfer times in the order of 200 days, continuous thrusting, and a continuously changing attitude. Combined, this translates into a significant effort for ground-based orbit determination.
The attractiveness of a GNSS implementation on-board is obviously significantly enhanced, if the system can perform well also during the operational phase in the geostationary orbit. Finally, the mass and cost of the system must be as low as possible in order to justify its implementation on board.
The overall purposes of this study have been to demonstrate the following:
- To evaluate the potential performances of a GNSS Rx during a representative low-thrust GTO transfer and also in the GEO
- To define the GNSS architecture, including optimum antenna placements on the spacecraft
- To establish the cost-effectiveness of such a system versus current ground-based orbit determination systems
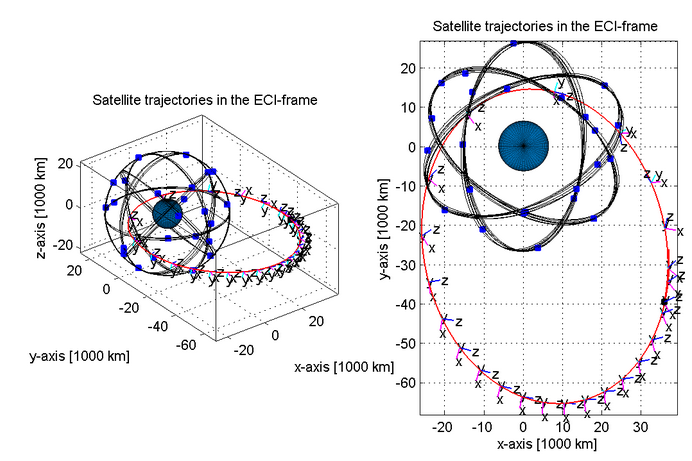
The key challenges of the project are related to the strongly varying visibility conditions of the GNSS satellites and the orbit determination/orbit propagation precision required to perform meaningful collision avoidance manoeuvres during EP thrusting.
The implementation of on-board GNSS can provide a cost-effective solution to orbit determination during EP orbit raising, and support the level of OD precision and propagation required to support collision avoidance manoeuvres.
Orbit determination precision is typically better than 100 m during 50% of each transfer orbit, and during 100% of the time when the perigee is below 2000 km (largest collision risk). The AOCSW navigation filter contains the function of estimating the EP thrust bias, which is by far the largest contributor to propagated positional uncertainty.
SYSTEM ARCHITECTURE
The hardware architecture is based on the use of two GNSS receive antennas, one optimised for the GEO geometry (nadir pointing) and one optimised for the GTO transfer (S/C +X). The antennas are connected via LNAs to redundant GNSS receivers. The receiver outputs are pseudo-ranges, fed to an EKM navigation filter within the AOCSW. The filter always provides a navigation solution to the on-orbit propagator, also when < 4 GNSS satellites are visible.
The project has consisted of three major milestones: 1. A preliminary review at which visibility conditions for various GNSS constellations and transfer scenarios have been simulated. 2. A mid-term review, where the performances of the AOCSW navigation filter have been demonstrated. 3. A final review where final simulation results have been compared to test results from a real-time test bench.
The study has been successfully completed in December 2015. No further activities are planned.
