
-
StatusCompleted
-
Status date2020-12-17
-
Activity Code4B.087
The intention of this study is based on the fact that for modern Electric propulsion systems the PPU is representing one of the most complex but also one of the most expensive items. This is driven by very specific requirements for the different thruster technologies which require a very strongly customized design and complexity. Beside the different ranges of the output parameters for the needed voltage- and current supplies there are other driving requirements like robustness to high noise during ignition of the thruster, accepting of alternating ground shifts during operation or to cope with shorts at the output caused by beam events.
The intention of this study was to start at exactly that point where technical solutions are available but always tailored for only one dedicated thruster technology and always customized for a specific mission.
The activity comprises the evaluation of the different requirements, finding the best intersection of them, defining a suitable PPU architecture and finally performing the detailed design activities, build and test the modular PPU breadboard. Accompanying to these activities several trade-offs and analysis have been performed to determine the most suitable technologies and topologies.
The main challenge of this study was to develop a PPU which provides a high grade of flexibility and modularity to serve a wide spectrum of thruster assemblies. This approach combined with the approach that the developed PPU shall also be competitive in terms of recurring costs, manufacturing and testing effort but also provide a small mass and acceptable envelope have been the demanding challenges of this study.
The modular approach combined with the digitalisation of the MODPS PPU comprises following benefits:
- Only one generic PPU for different thruster assemblies
- This offers the opportunity to remain the PPU if the thruster assembly has to be ex-changed e.g. due to non-availability
- Covering a wide bandwidth for the power supplies without hardware modification as:
- Selection of operational behaviour via TC (e.g. the valve supply can be operated as DC voltage pull-in and hold supply but also generating a PWM output as needed for proportional valves)
- Programmable output voltages / currents via TC
- Adjustments during flight via TC to eliminate drifts caused by ageing, thermal or radiation effects possible
- Adjustable protection levels via TC
- Programmable control loop behaviour
- If required, easy exchangeability of functional groups (e.g. replacement of ICM with Mil-Bus I/F to e.g. CAN bus with no impact to other modules)
- Standardized I/Fs allow to equip the PPU with the different thruster specific modules by using the provided periphery
- Modular approach allows to arm the PPU for different power classes e.g. 5kW for orbits raising purposes or e.g. only 2.5kW if only station keeping is planed
- The generic modular approach has been reflected in the PPU periphery like provision of a second individual configurable “spare” flex PCB, isolated and protected internal power supplies or the possibility to configure the PPU to grounding concepts different (isolated or non-isolated)
The design of the PPU is composed of the modules listed below. The main focus has been on the two complete new developments for the neutralizer- and valve supplies:
- Interface Control Module (ICM):
- Mil-Bus I/F
- Auxiliary Supply
- Neutralizer Module (NTR):
- NTR heater- and keeper supply
- Inlet isolation valve, thruster valve and neutralizer valve supply
- Interconnecting Rigid Flex
- As a kind contribution: Positive High Voltage Module (PHV):
- Adaption of existing EM to MODPS needs
The electrical performance parameters for the developed new neutralizer- and valve supplies have been determined from the available PPU specifications. The via TC programmable ranges and operation conditions are shown below:

After detailed trade-off, the most suitable PPU architecture -- following the modular approach of this study -- a standard core design was determined which is representing a kind of platform that can be customized individually. The idea behind the modular standard core approach is to define a standard core which contains all non-thruster specific power supplies. However, all thruster specific supplies like the RFG supply for the RIT are also added into the same box. The main logic of this concept is to provide a full developed core periphery with the flexibility to customize for the different thrusters and missions. Beside the possibility to add the thruster specific supplies to the box, for the core harmonised electrical and mechanical I/Fs have been defined to allow the easy exchange of the modules if this is required for a dedicated application.
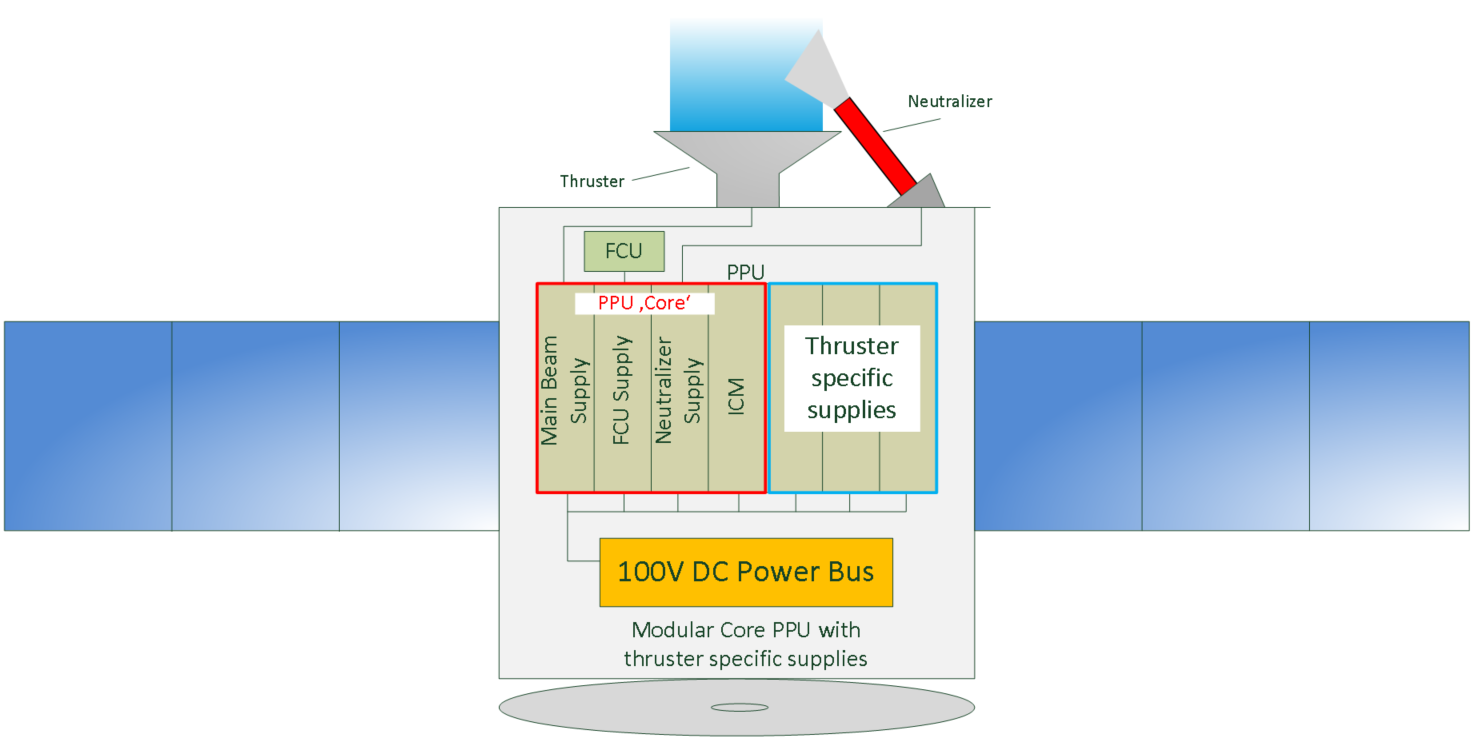
The block diagram of this PPU concepts and the thruster periphery is shown below.
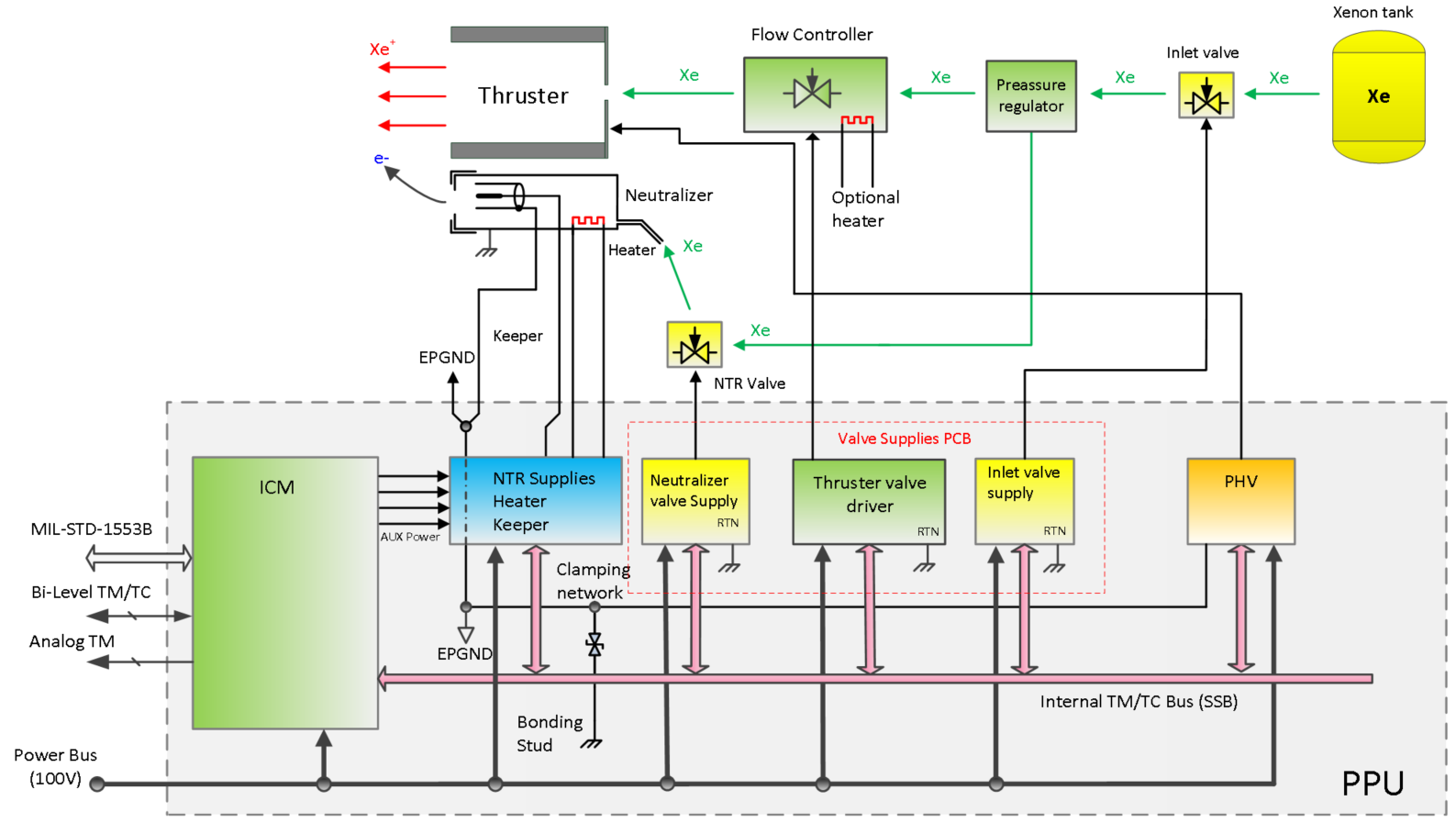
The PPU follows a modular design concept, which allows an easy tailoring of the unit for different satellite platforms and operation concepts of the propulsion system. Beside the measures to prevent single point failures or failure propagation, no additional redundancy within the PPU is established in alignment with the trade-off results.
Baseline Requirements Review (BRR), Architecture Review (AR), Design Review (DR), Test Readiness Review (TRR) and Final Review (FR)
Completed