
-
StatusOngoing
-
Status date2022-06-22
-
Activity Code5G.025
During the past years, optical data transfer has become an essential technology to meet the ever-increasing demand for high data rates and bandwidth in communication over long distances. However, this kind of communication technology demands highest pointing accuracy of the optical systems and the capability to rapidly adapt to misalignments and disturbances.
The objective of the project is to develop a piezo-electrically driven, two-axis mirror tilting system to be utilized in fast beam steering mechanisms for optical inter-satellite link systems.
In the communication terminal, beam misalignments are measured with a tracking sensor and are closed-loop compensated by a Fine Steering Mirror (FSM), whereas the Point Ahead Mirror (PAM) generates an offset angle between the transmitted and receiving beams to compensate for the satellite motion during the laser light running time.
Within the project a system is designed that meets the typical specifications of both FSM and PAM application and thus provides one solution for two problems, significantly reducing integration efforts and costs of such optical systems.
The main challenge within the project is to design a system that meets the technical criteria of both typical FSM and PAM applications with sufficient tilting angles and high frequency response over a wide temperature range. In addition, the system needs to be space qualified offering outstanding life time and superior robustness to withstand shock and vibration during launch while being compact in size and cost efficient in production.
The utilization of piezoelectric actuators in a fast beam steering mechanism provides several benefits. As a solid-state-effect, piezoelectric motion shows no mechanical play and theoretically unlimited positioning resolution. This allows for highest pointing accuracy of the optical systems. Due to their capacitive nature, piezo actuators do not consume electrical power while holding a position. This makes them an ideal choice for space applications, where low power consumption is mandatory.
With the design of a system that meets the specifications of both FSM and PAM applications we provide one single solution for two different problems. This results in a reduction of both costs and integration effort.
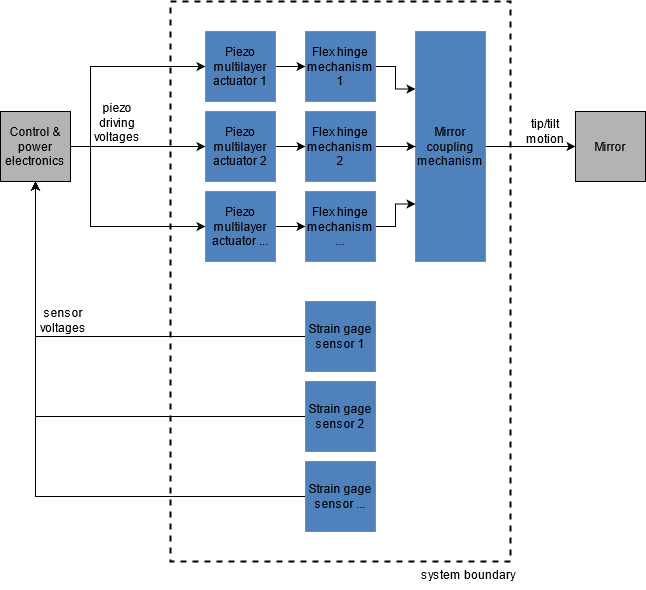
The system features a number of piezoelectric multilayer actuators that are able to convert an electrical input signal into a motion. A sophisticated mechanical amplification and guiding mechanism transfers the motion into a tilting angle of the mirror holder and the mirror. The motion is measured with a set of position sensors that enable a closed loop control of the two-dimensional angular motion of the mirror.
The whole mirror tilting system is specially tailored for space operation resulting in:
-
mass reduction
-
size reduction/ construction space adaption
-
increased stiffness
-
high robustness to withstand shock and vibration during launch
-
wide operating temperature range
-
high lifetime
The mirror tilting system consists of several piezo-electrically actuated flex hinge designs, which are coupled to a mirror holder.
The main components of the product are:
-
The piezo multilayer actuators, converting electrical energy into motion.
-
Several flex hinge mechanisms, which amplify the input motion of each piezo into an output motion with larger stroke and smaller force.
-
A coupling mechanism, which transforms these motions into the mirrors tilting angles.
-
Several strain gage sensors to measure the tilting angles
Milestones:
-
MS1: Kick-Off-Meeting (T0)
-
MS2: Preliminary Design Review (T0 + 0.5)
-
MS3: System Requirements Review (T0 + 1)
-
MS4: Preliminary Design Review (T0 + 5)
-
MS5: Test Readiness Review (T0 + 9)
-
MS6: Test Review Board (T0 + 13)
-
MS7: Final Review (T0 + 14)
Activities started in Dec 21.
Currently working on MS4
